Htc Sitting Tracking With One Light House
Valve's 'Lighthouse' tracking system affords the HTC Vive a 'room-scale' tracking space for the VR headset and its controllers through the use of area-sweeping lasers. But exactly how accurate is it? Oliver Kreylos, a VR researcher at UC Davis, has a great analysis of the system which tells us that and much more.
Oliver "Doc-Ok" Kreylos holds a Phd in Computer Science and has an extensive history of virtual reality data visualization research. So much so that he created his own VR software called VRUI, allowing him to visualize, manipulate, and analyze data in virtual reality on a variety of different systems. Having once relied on enterprise VR systems like CAVEs, Kreylos has over the years been exploring the latest wave of consumer VR hardware and analyzing its suitability for his line of work in the process.
And that's how we come to find a detailed post on his blog analyzing the inner workings of Lighthouse tracking, including a measurement of its accuracy. If you find the nitty gritty of Lighthouse's tracking interesting, I'd highly recommend reading the entire post. For those more interested in the results, here's what Kreylos found.
Visibility by More Base Stations Means More Precision
A base station is the little box that's the foundation of the Lighthouse Tracking System. It uses alternating sweeps of horizontal and vertical lasers to pass over the HTC Vive headset and SteamVR controllers which are covered in small sensors that detect that lasers as they go by. The system cleverly integrates all of this data to determine the rotation of the devices and their position in 3D space. High speed on-board IMUs in each device are used to aid in tracking.
Kreylos sought to measure the 'jitter' of the system, the imprecision of the measurements when the measured object (in this case, the headset) is standing completely still. By plotting the position of each reading reported by the tracking system in 3D space over time, he was able to measure the volume of the readings in each axis.

With both base stations tracking the Vive headset, Kreylos found that the jitter of the system was around 0.3mm, meaning that as far as the tracking system is concerned, the headset appears to be jumping around in the space of a sphere that's about 0.3mm across in all directions (though in reality the headset is sitting absolutely still).
Fortunately this sub-millimeter jitter is so small that it's virtually imperceptible to our brains when donning the headset.
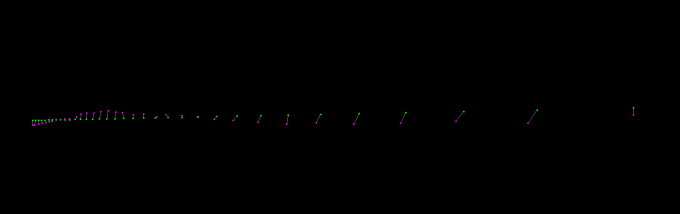
Interestingly, Kreylos found that when only one base station was covered and thus not able to track the headset, the jitter remained about 0.3mm except in the axis pointed toward the other base station, where the jitter bounced around an area of 2.1mm.
This of course means that Lighthouse can more precisely track objects when it can be seen by both base stations. This might make a case for putting sensors on the back of future iterations of the Vive headset so that it can be seen at all times by both base stations.
Precision and Accuracy
Kreylos also sought to measure the precision and accuracy of Lighthouse. He explains the precision measurement being "how close multiple subsequent measurements of the same point in space are to each other," and accuracy as "how close a measurement of a point in space is to the actual position of that point in space."
Like any good scientist, he first explains his methodology for the measurements:
I placed a 36″ long ruler onto the floor in the center of my tracked space, and measured the 3D position of each 1″ mark using a small probe tip I attached to one of the tracked controllers (the probe tip's position in the controller's local coordinate frame, which is essential for repeatable point measurements, was derived from a simple calibration procedure). I then compared the resulting set of 3D points to the "ideal" set of 3D points, generated by computing each mark's theoretical position in some arbitrary coordinate system, by running a non-linear point set alignment algorithm.
Based on these measurements, Kreylos estimated the precision of Lighthouse tracking to be around RMS 1.5mm and the accuracy around RMS 1.9mm.
Despite some distortion in the measurement seen above, Kreylos says "overall accuracy [of Lighthouse] is very good," and further conclude that "As a practical result, it is therefore possible to use a Lighthouse controller with an attached and calibrated probe tip as a large-area 3D digitizer, with an expected accuracy of about 2mm."
Drift Correction
Kreylos also examines and explains the way in which the measurements form the controller's IMUs are corrected by the Lighthouse system as the lasers sweep across them in each axis.
By spinning the controllers around his head at high speed and plotting the measurements, Kreylos visualizes the drift corrections as they happen.
Oliver Kreylos will be speaking at VRLA Summer Expo 2016 next month in Los Angeles.
Feature image courtesy Doc-OK.org
Htc Sitting Tracking With One Light House
Source: https://www.roadtovr.com/analysis-of-valves-lighthouse-tracking-system-reveals-accuracy/
0 Response to "Htc Sitting Tracking With One Light House"
Post a Comment